



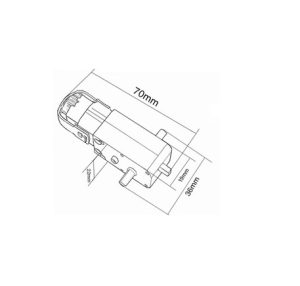
موتور DC گیربکس دار 1:48 دو محور یک موتور پرکاربرد و اقتصادی برای پروژههای رباتیک، آموزشی و DIY است. این موتور با داشتن گیربکس پلاستیکی با نسبت تبدیل 1 به 48، گشتاور خروجی مناسبی را در کنار سرعت کنترلپذیر ارائه میدهد. طراحی دو محور (Dual Shaft) امکان نصب انکودر، چرخ، پولی یا قطعات مکانیکی از هر دو سمت موتور را فراهم میکند.
ویژگیهای کلیدی و فنی موتور DC گیربکس دار 1:48 دو محور:
این موتور گیربکس از یک موتور DC کوچک و یک جعبهدنده (گیربکس) پلاستیکی تشکیل شده است که سرعت بالا را به گشتاور (قدرت) تبدیل میکند.
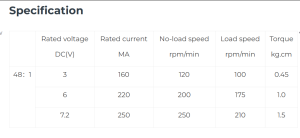
| ویژگی فنی | مقدار تقریبی / توضیح | مزیت طراحی |
| نسبت گیربکس | ۱:۴۸ | تعادل عالی بین سرعت حرکت و قدرت کشش ربات. |
| تعداد محور خروجی | ۲ محور (دو طرفه) | امکان اتصال همزمان چرخ و انکودر (برای سنجش سرعت). |
| ولتاژ کاری | ۳ تا ۶ ولت DC | امکان راهاندازی با ۲ تا ۴ باتری قلمی یا باتری لیتیومی. |
| سرعت خروجی | ۱۰۰ تا ۲۰۰ دور در دقیقه (RPM) | متناسب با ولتاژ ورودی؛ ایدهآل برای رباتهای متحرک. |
| جنس گیربکس | پلاستیک فشرده | وزن بسیار کم و قیمت مقرونبهصرفه برای پروژههای آموزشی. |
کاربردهای اصلی موتور گیربکس دار دو محوره:
وجود دو محور خروجی، این موتور را از مدلهای تکمحور متمایز میکند:
-
ساخت رباتهای متحرک (Wheeled Robots): پرکاربردترین موتور برای ساخت رباتهای مسیریاب (Line Follower)، حل ماز و رباتهای کنترلی ساده.
-
استفاده از انکودر (Speed Sensing): میتوان به یک محور چرخ را متصل کرد و به محور دیگر یک دیسک انکودر نوری متصل نمود تا مسافت طی شده و سرعت ربات توسط میکروکنترلر اندازهگیری شود.
-
رباتهای چهار چرخ (4WD): با استفاده از چهار عدد از این موتورها، میتوان شاسیهایی با قابلیت حرکت در سطوح ناهموار طراحی کرد.
-
پروژههای STEM و آموزشی: به دلیل ولتاژ پایین و ایمنی بالا، بهترین گزینه برای آموزش مفاهیم الکتریسیته و مکانیک به دانشآموزان است.
- ♦ رباتهای آموزشی و دانشآموزی
♦ رباتهای مسیریاب و هوشمند
♦ پروژههای Arduino، STM32، ESP32
♦ خودروهای کنترلی کوچک
♦ مکانیزمهای حرکتی سبک
♦ مناسب برای چرخ، انکودر و گیربکسهای جانبی
مزایای مدل “دو محور” نسبت به “تک محور”:
-
مانیتورینگ دقیق: در مدلهای تکمحور، اگر بخواهید انکودر نصب کنید، باید آن را بین چرخ و بدنه جا دهید که فضا را اشغال میکند. در مدل دو محور، انکودر در سمت مخالف چرخ نصب میشود و تداخلی با حرکت ندارد.
-
توزیع نیرو: در برخی طراحیهای خاص، میتوان از یک موتور برای چرخاندن دو مکانیزم همزمان (مثلاً یک چرخ و یک بازوی کوچک) استفاده کرد.
نکات مهم در استفاده و نگهداری از موتور DC گیربکس دار:
-
جریان مصرفی: این موتورها در لحظه شروع به حرکت (Stall Current) جریان قابل توجهی میکشند. از اتصال مستقیم آنها به پینهای میکروکنترلر (مثل آردوینو) خودداری کنید و حتماً از درایورهایی مانند L298 یا L293D استفاده کنید.
-
حفاظت از گیربکس: چرخدندههای این موتور پلاستیکی هستند. وارد کردن فشار بیش از حد یا ضربه ناگهانی به محورها میتواند باعث خرد شدن دندهها شود.
-
حذف نویز (EMI): برای جلوگیری از تأثیر نویز موتور روی عملکرد میکروکنترلر، توصیه میشود یک خازن عدسی ۱۰۰ نانوفاراد بین دو قطب موتور لحیم کنید.
⚠️ نکته: مقادیر سرعت و گشتاور بسته به ولتاژ تغذیه و بار مکانیکی متغیر است.
جهت بررسی دقیق تر و دریافت اطلاعات کاملتر میتوانید به دیتاشیت موتور DC گیربکس دار مراجعه کنید.
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.