



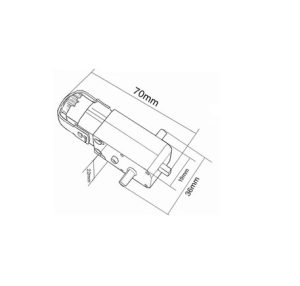
موتور DC گیربکس دار 1:120 دو محور گزینهای مناسب برای پروژههایی است که به گشتاور بالا و سرعت کم نیاز دارند. این موتور با بهرهگیری از گیربکس با نسبت تبدیل 1 به 120، توانایی حرکت بارهای سبک تا متوسط را با کنترلپذیری بالا فراهم میکند. طراحی دو محور (Dual Shaft) امکان نصب چرخ، انکودر یا سایر قطعات مکانیکی را از هر دو سمت شفت خروجی فراهم میسازد.
ویژگیهای کلیدی و فنی موتور DC گیربکس دار 1:120 دو محور:
تفاوت اصلی این مدل موتور گیربکس در طراحی داخلی گیربکس آن نهفته است:
| ویژگی فنی | مقدار / توضیح | مزیت مهندسی |
| نسبت تبدیل | ۱:۱۲۰ | افزایش چشمگیر قدرت؛ مناسب برای رباتهای سنگینتر یا حرکت در شیب. |
| تعداد محور | ۲ محور (Double Shaft) | امکان نصب چرخ در یک سمت و انکودر یا نشانگر جهت در سمت دیگر. |
| ولتاژ کاری | ۳ تا ۶ ولت DC | بهینه شده برای ولتاژ ۳.۷ ولت (باتری لیتیومی) یا ۵ ولت (پاوربانک). |
| سرعت خروجی | ۴۰ تا ۸۰ دور در دقیقه (RPM) | سرعت کمتر نسبت به مدل ۱:۴۸ اما حرکتی نرمتر و با پایداری بیشتر. |
| گشتاور (Torque) | حدود ۱.۵ تا ۲ کیلوگرم-سانتیمتر | توانایی جابهجایی شاسیهای سنگین یا عبور از موانع کوچک. |
کاربردهای اصلی موتور گیربکس دو محوره:
این موتور برای پروژههایی که «قدرت» بر «سرعت» اولویت دارد، انتخاب اول است:
-
رباتهای امدادگر و جنگجو (سبک): به دلیل گشتاور بالا، این موتورها میتوانند از موانع یا ناهمواریهای سطح زمین راحتتر عبور کنند.
-
شاسیهای رباتیک ۴ چرخ (4WD): برای ساخت رباتهایی که وزن باتری و تجهیزات جانبی زیادی دارند (مانند رباتهای حامل دوربین).
-
مکانیزمهای جابهجایی و بالابر: استفاده در پروژههایی که نیاز به پیچاندن یک نخ یا جابهجایی یک بازوی سبک دارند.
-
رباتهای دقیق با انکودر: استفاده از محور دوم برای نصب دیسک انکودر جهت کنترل دقیق موقعیت (Position Control)؛ در سرعتهای پایین (RPM کم)، دقت انکودر برای توقف در نقاط مشخص بالاتر میرود.
- ♦ رباتهای آموزشی و دانشآموزی
♦ رباتهای مسیریاب و حمل بار سبک
♦ پروژههای Arduino، STM32، ESP32
♦ خودروهای رباتیک با نیاز به گشتاور بالا
♦ مکانیزمهای حرکتی دقیق با سرعت پایین
دلیل انتخاب مدل ۱:۱۲۰:
-
کنترل بهتر: سرعت پایینتر باعث میشود میکروکنترلر فرصت بیشتری برای پردازش دادههای سنسور داشته باشد (مثلاً در رباتهای حل ماز یا مسیریاب دقیق).
-
پایداری در شیب: این موتورها هنگام حرکت روی سطوح شیبدار، کمتر دچار لغزش به عقب میشوند.
-
مصرف بهینه در بار سنگین: در وزنهای بالا، فشار کمتری به هسته موتور DC وارد میشود چون گیربکس بخش بزرگی از فشار را تحمل میکند.
نکات حیاتی در طراحی و راه اندازی موتور DC گیربکس دار:
-
جریان مصرفی: با وجود گیربکس قوی، هنگام قفل شدن موتور (Stall)، جریان افزایش مییابد. حتماً از درایورهای استانداردی مثل L298N یا TB6612FNG استفاده کنید.
-
استحکام بدنه: بدنه پلاستیکی این موتورها در برابر ضربات شدید حساس است. هنگام بستن پیچها روی شاسی، فشار بیش از حد وارد نکنید تا پوسته گیربکس ترک نخورد.
-
نویزگیری: به دلیل وجود برس (Brush) در موتور DC، نویز الکتریکی تولید میشود. لحیم کردن یک خازن ۱۰۴ (۱۰۰ نانوفاراد) بین دو قطب موتور برای سلامت عملکرد میکروکنترلر ضروری است.
⚠️ نکته: سرعت نهایی و گشتاور خروجی بسته به ولتاژ تغذیه و بار مکانیکی متغیر است.
جهت کسب اطلاعات بیشتر میتوانید در قسمت دیتاشیت موتور DC گیربکس دار، به موارد مورد نیاز خود دسترسی داشته باشید.
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.